ミニぷぱ(Mini Pupper)のキャリブレーションは意外に失敗しやすいポイントです。ここで失敗するとうまく走行できなかったりこけやすかったりします。実際に私も最初はキャリブレーションに失敗してこけやすく仕上がってしまい、サポートに問い合わせました。
まず、キャリブレーションには、
- 45°(新しいバージョン)
- 90°(古いバージョン)
の2種類の角度があります。PS4版のキャリブレーション時に、公式マニュアル通りにやると45°のキャリブレーションをするようになっていますが、これが難しい。しかし慣れた今ではコツが分かるので紹介します。
あと、PS4版のマニュアル通りにやったつもりでしたが、なぜか90°でキャリブレーションしなければなかったです。これもキャリブレーションに失敗した理由なのですが。
最新のPS4版のソースコードでは45°になっています。個人的には90°がキャリブレーションしやすいと思いましたが、開発元のMangDang社によると「45°が分かりやすい」という意見が多数でこれに決定したとのことでした。
これもかなり慣れてから気付いたこですが、OSイメージをダウンロードできる場所が、
- OSイメージ: MiniPupperRelease.from.MangDang - Google ドライブ(新しいバージョン)
- OSイメージ: MiniPupperDocs - Google ドライブ(古いバージョン)
このように複数あります。新しいOSイメージをダウンロードするように気を付けましょう。
45°のキャリブレーションの「こつ」
具体的には下の図のようになります。図は公式マニュアル「ソフトウェア — Mini Pupper 1.0.0-alpha ドキュメント」から引用した画像を少し加工したものです。
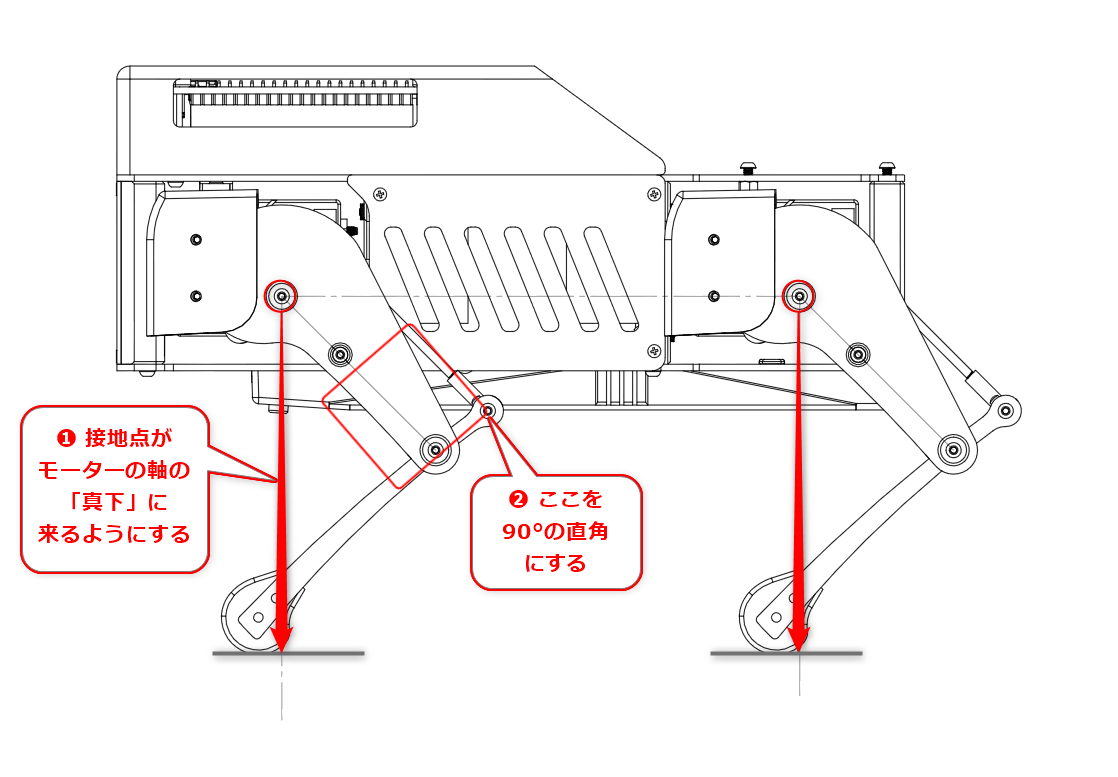
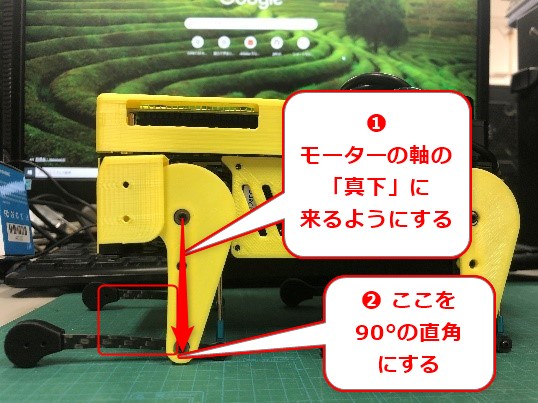
特に重要なのが(1)です。各足の接地点がモーターの軸の完全に真下にすることでこけることがほぼ無くなりました。マニュアルでは45°が強調されていますが、わたしの感想ではこの点が重要で、あとは(2)の関節部分を90°にすればよいだけです。これだけです。45°の分度器は不要です。
90°のキャリブレーションの「こつ」
もう一方の90°の方は簡単です。具体的には下の図のようになります。図は公式マニュアル「SLAM・ナビゲーション — Mini Pupper 1.0.0-alpha ドキュメント」から引用した画像を少し加工したものです。
単純なキャリブレーションは90°の方が簡単だと思いますが、実際の走行バランスが正確に取れることを考えると、確かに45°でキャリブレーションするのが一番いいですね。
「ミニぷぱの走行バランスがおかしい」「ミニぷぱがこけやすい」という人は、ミニぷぱが静止して起立した状態で、上の45°の状態になっているかを確認してみるとよいと思います。